|
Kyle Chuang | ME405 Mechatronics Portfolio
|


|
|
Kyle Chuang | ME405 Mechatronics Portfolio
|
|
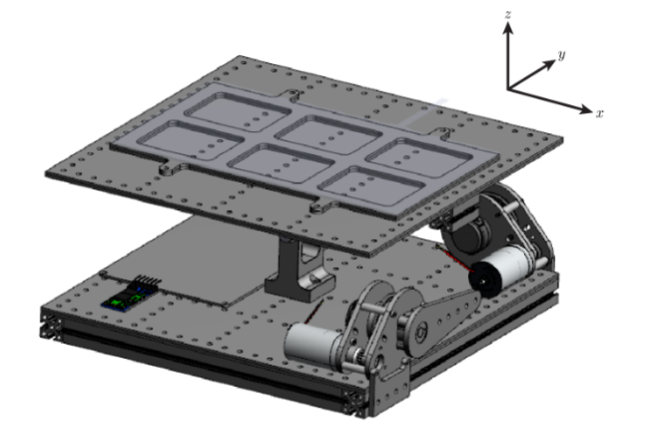
For this lab I worked to develop a simplified model of a pivoting platform as shown in the picture below. This has been done as we will eventually design a controller to balance a ball atop the platform.
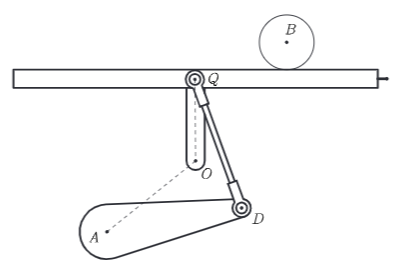
First, I started by heavily simplifying our system. The list of assumptions used is displayed below:
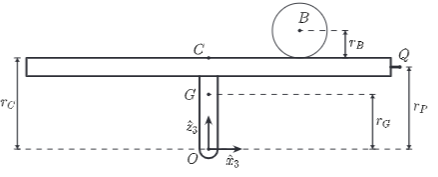
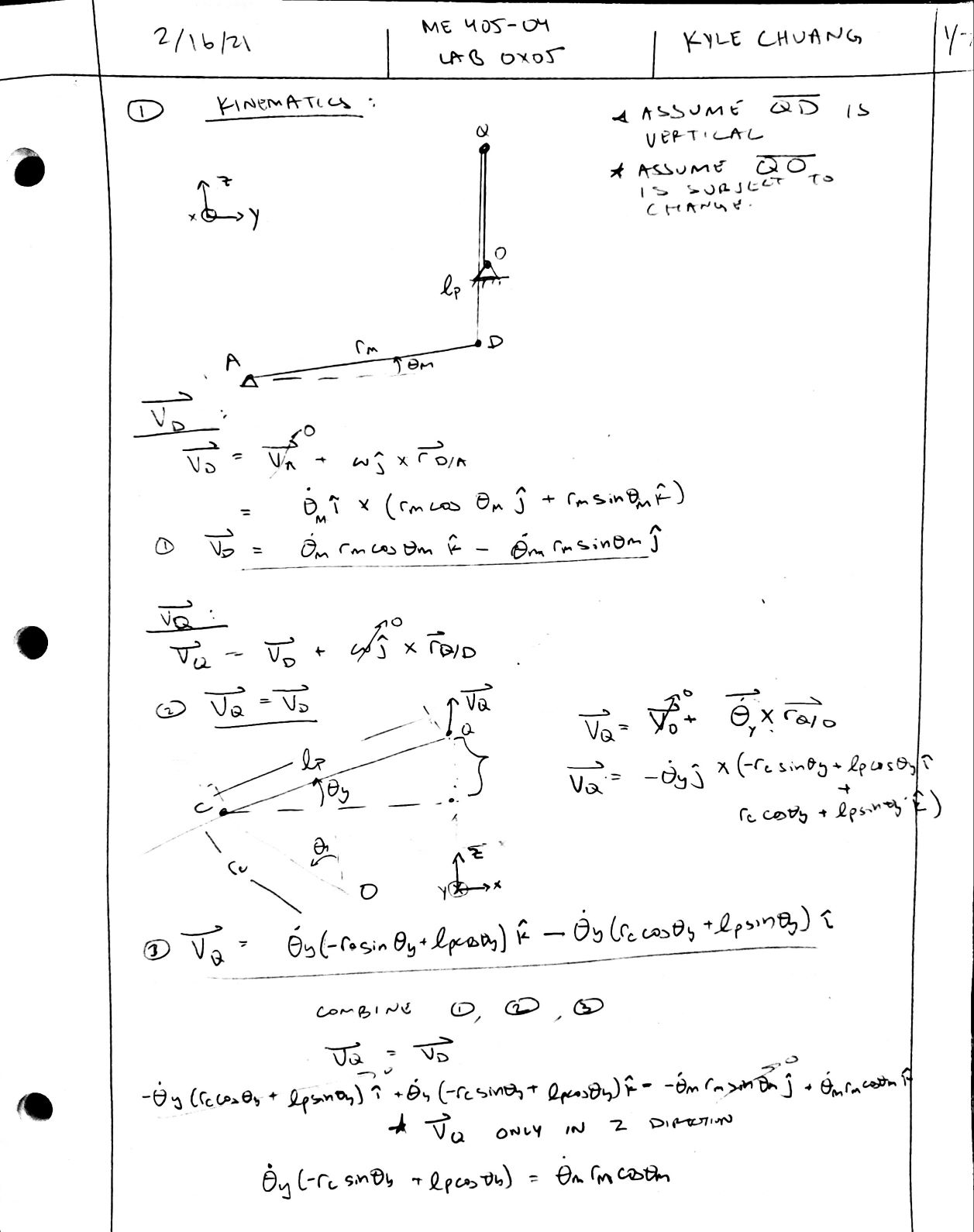
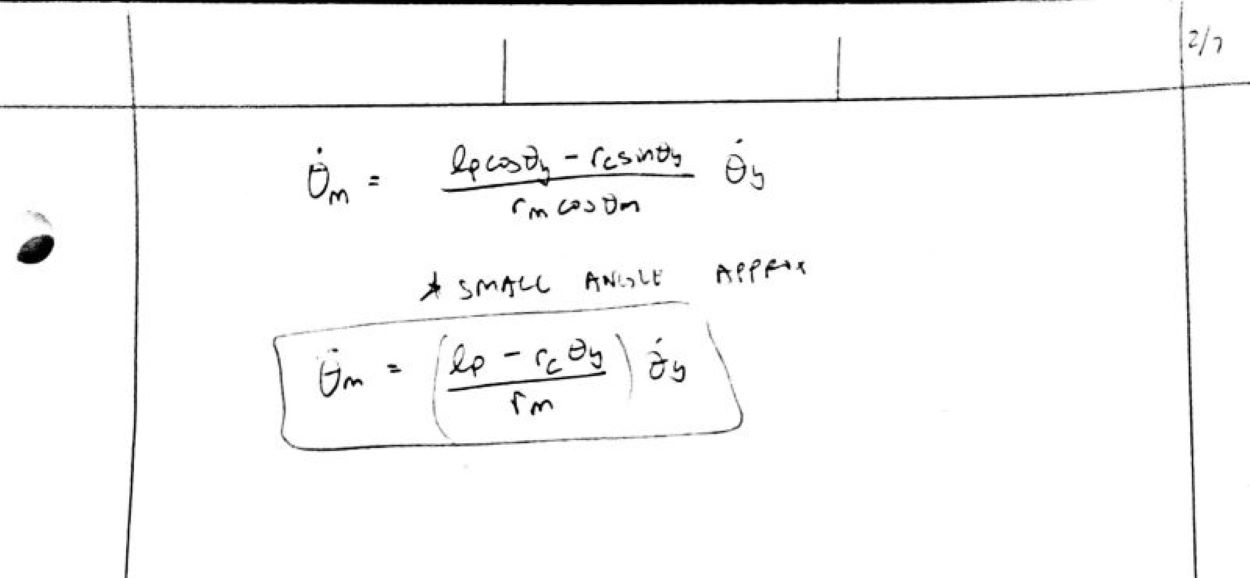
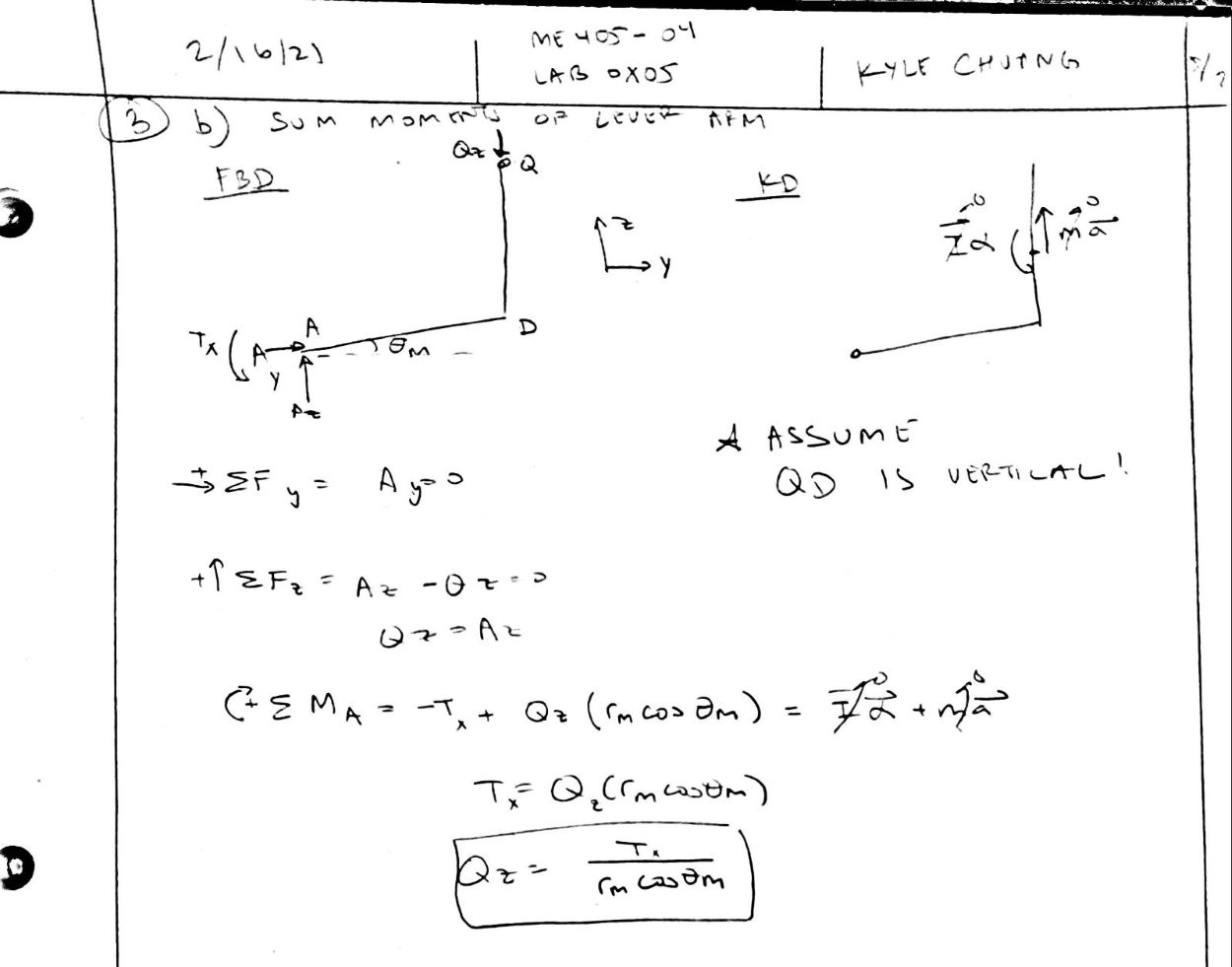
I started creating our model by drawing a siumplified schemativ of the 4 bar linkage OADQ. Using this schematic and the small angle approximation, I developed a kinematic relationship between the motion of the motor about point A (theta_M) and the motion of the platform about point O (theta_y). An important assumption I used for this system is that linkage QD acts purely vertically. This allowed me to relate the velocity of points Q and D by setting them equal to eachother. The analysis is shown in the hand calculation below.
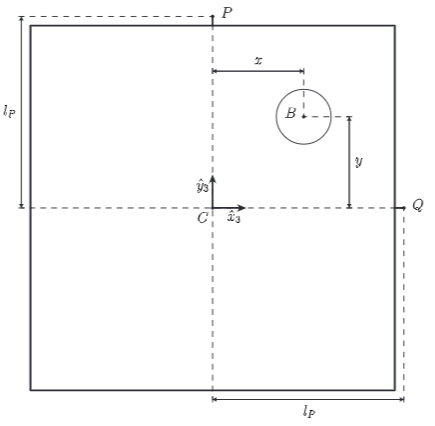
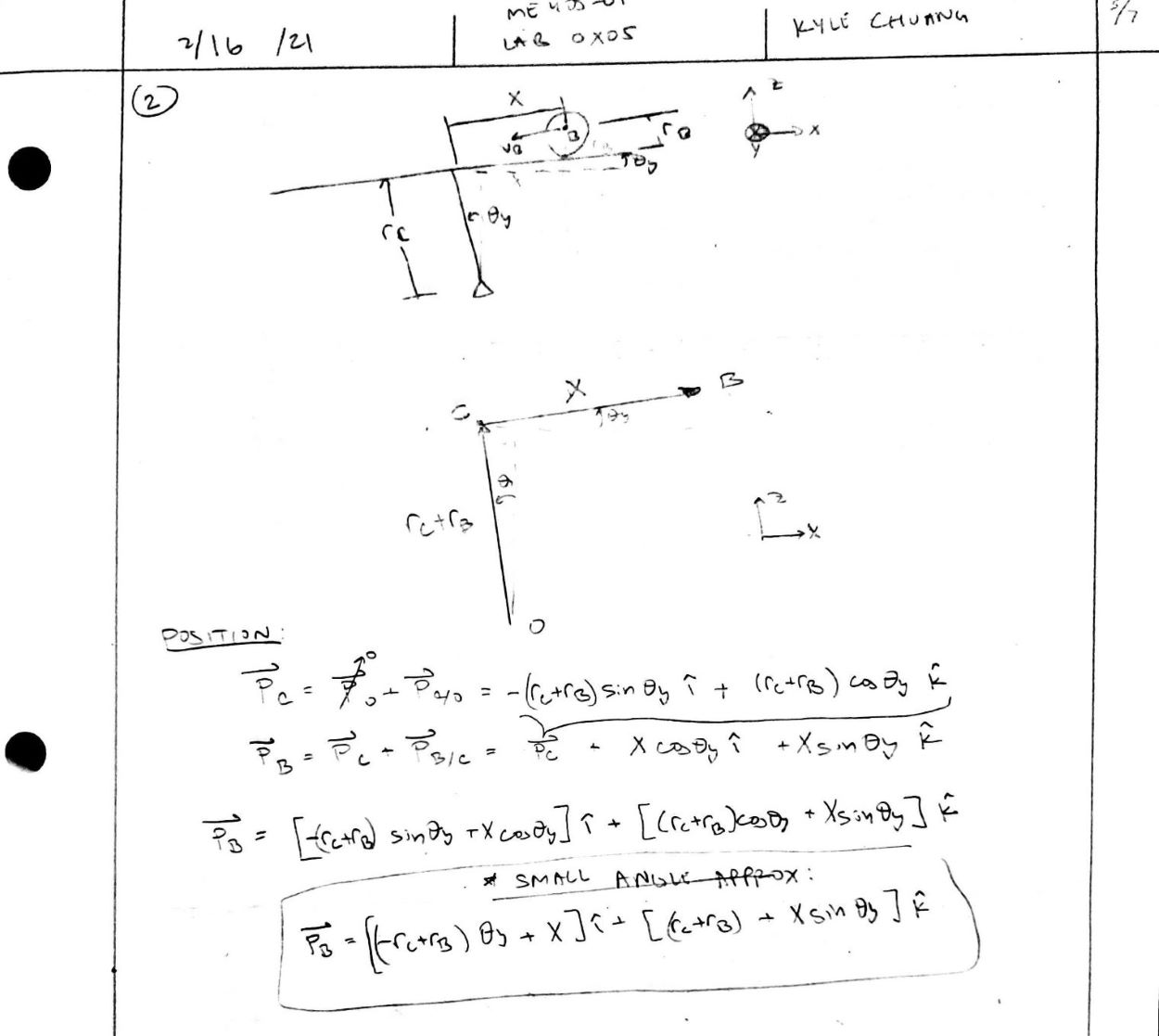
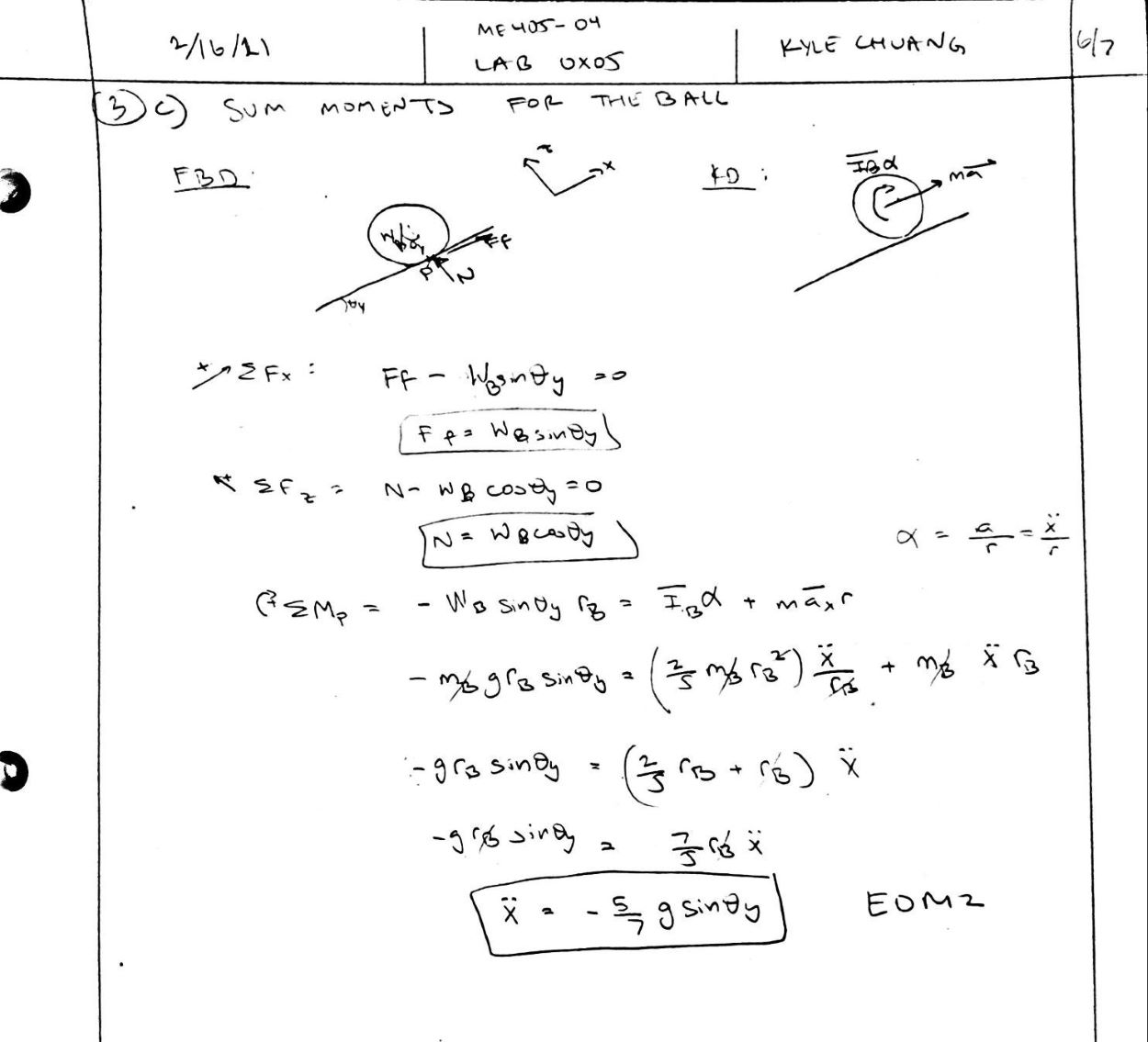
After that, I developed a kinematic relationship between the motion of the platform (thetadot_y) and the motion of the ball (xdot). An important assumption for this model is using the no slip condition such that the only motion of the ball are parallel to the platform
Next, I found equations of motion for the system through kinetics. I started by summing the moments about point O for the platform and ball assembly with the lever arm and push rod replaced by reaction forces at point Q. I assumed that the reaction forces at Q acted stricly in the z plane. This gave me the first equation of motion for the angular acceleration of the platform (thetadoubledot_y), however, I still had many unknowns.
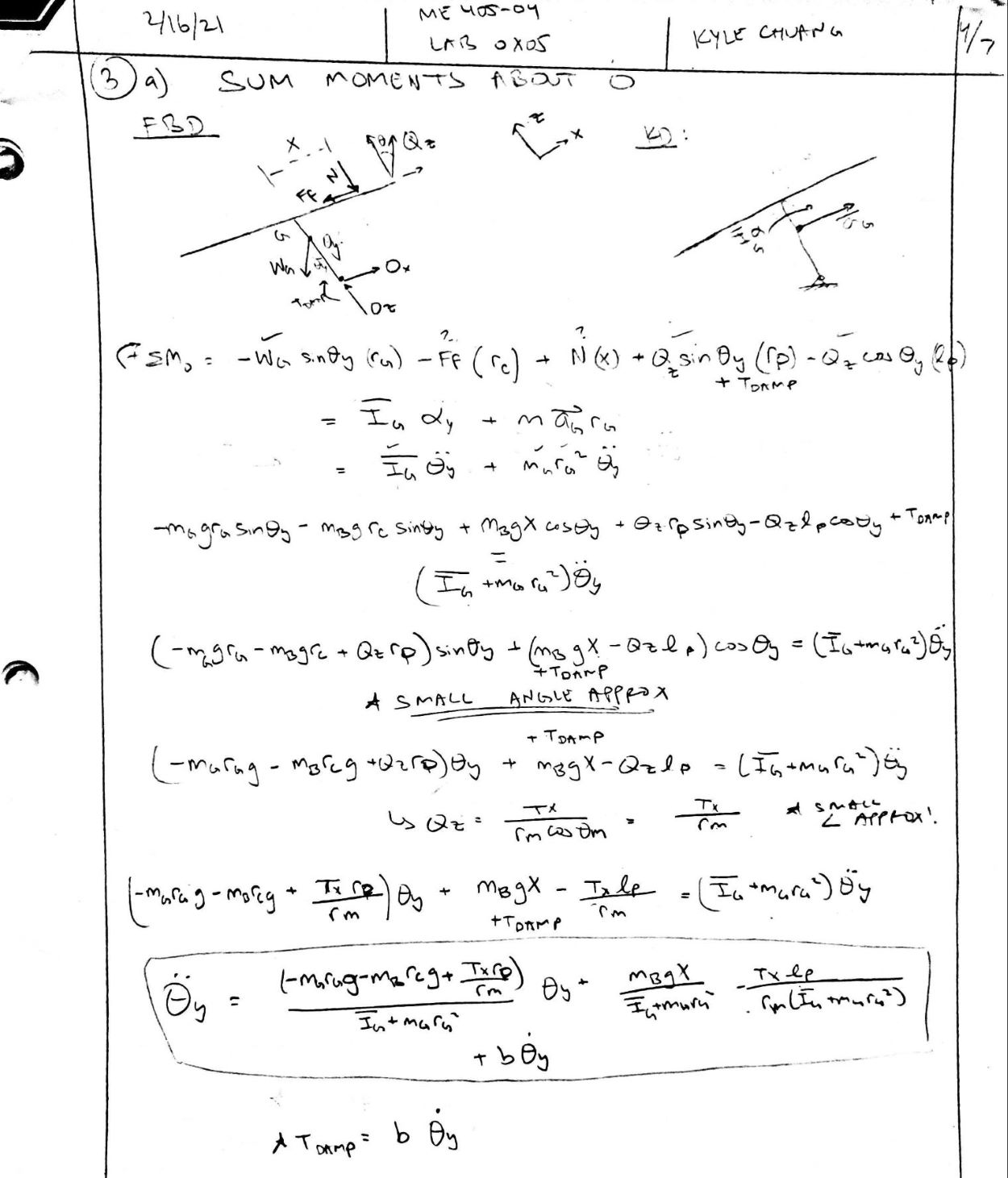
To eliminate the reaction force at Q, I summed the moments about point A for the lever arm and the push-rod with the platform replaced by reaction forces at point Q. This gave me Q_z in terms of the motor torque, T_x.
Then I summed the moments at the contact point between the ball and the platform considering only the ball. This gave me our second equation of motion for the acceleration of the ball (Xdoubledot). Additionally, I summed forces in the x and z plane to eliminate the friction force and normal force unkowns from the first equation of motion.
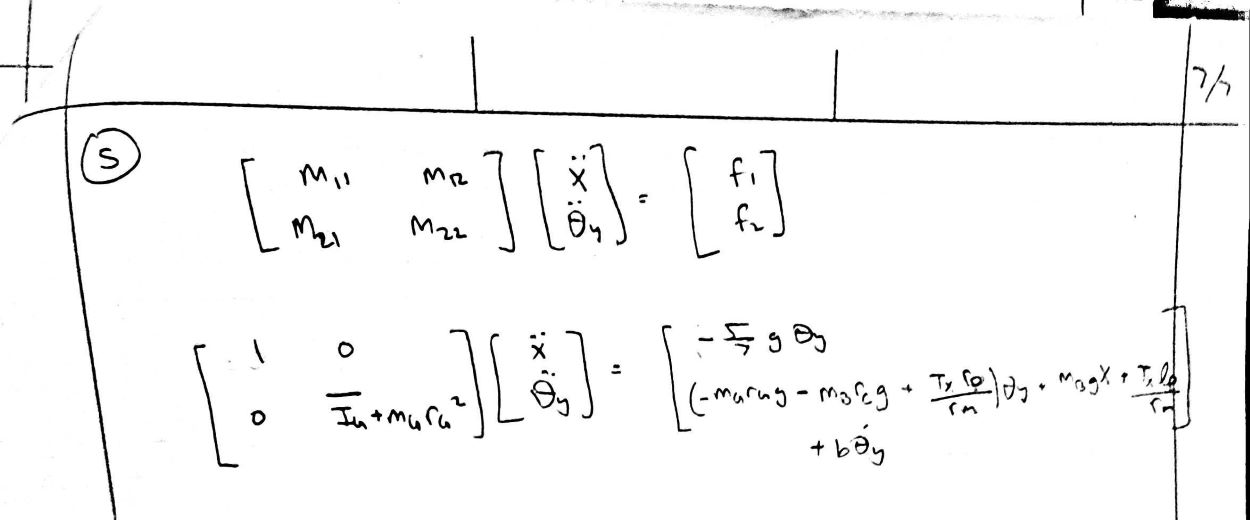
Finally, I isolated the unkown accelerations and reformatted the equations into the matrix representation shown in the picture below. In future assignments, I will use this model with numerical parameters to run a simulation of the equations of motion.